




| 제목 | 답변완료 22~23강 matlab | ||
|---|---|---|---|
| 질문유형 | 강좌내용 | 교수님 | 권준표 |
| 과목 | 진동학 | 강좌명 | |
| 작성자 | 정*호 (r******0) | 등록일 | 2021-07-25 15:46 |
| 첨부파일 | |||
|
코드는 교수님 강의자료에 첨부된 코드를 참고했습니다.
close ALL clear clc %% Mass m=[4 4 4]; k=[4 4 4]; W=[1 0]; M=diag(m); x0=[1;0;0]; v0=[0;0;0]; t=0:0.01:10; %% Global Stiffness Matrix elem=size(k,2); nodes=elem+1; K=zeros(nodes); % Connectivity Matrix for i=1:elem con(i,1:2)=[i i+1]; end for i=1:elem ke=k(i)*[ 1 -1; -1 1]; node1=con(i,1); node2=con(i,2); K(node1,node1)=K(node1,node1)+ke(1,1); K(node1,node2)=K(node1,node2)+ke(1,2); K(node2,node1)=K(node2,node1)+ke(2,1); K(node2,node2)=K(node2,node2)+ke(2,2); end if W(1)==1 && W(2)==0 K=K(2:end,2:end); elseif W(1)==0 && W(2)==1 K=K(1:end-1,1:end-1); elseif W(1)==1 && W(2)==1 K=K(2:end-1,2:end-1); else K=K; end %% Calcaultions L=sqrt(M); Kmn=inv(L)*K*inv(L); [v,lamda]=eig(Kmn); P=v; % check P`*P=I S=inv(L)*P; r0=inv(S)*x0; rdot0=inv(S)*v0; w=diag(sqrt(lamda)); for i=1:size(m,2) r(i,:)=sqrt(r0(i)^2+rdot0(i)^2/w(i)^2)*cos(w(i)*t); % atan값이 pi/2이므로 cos(w(i)*t)로 입력 end x=S*r; %% Plot figure(1) plot(t,x(1,:),`linewidth`,2) hold on plot(t,x(2,:),`linewidth`,1) plot(t,x(3,:),`linewidth`,1) legend_entries={`x1(t)`,`x2(t)`,`x3(t)`}; legend(legend_entries,``,`northeast`); grid on xlabel(`Time (s)`) ylabel(`Displacement (m)`) title(`Three-Degree-of-Freedom Model (Undamped)`)
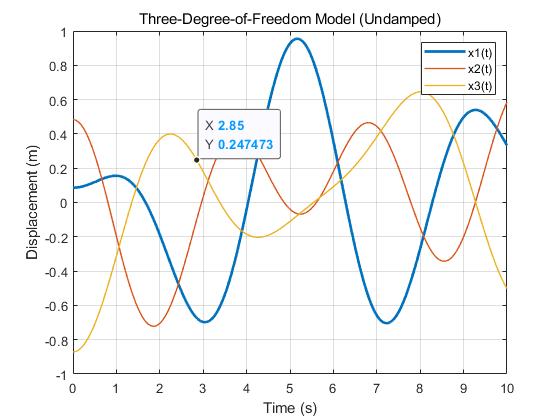
49번째 줄 r(i,:)=sqrt(r0(i)^2+rdot0(i)^2/w(i)^2)*sin(w(i)*t+atan(w(i)*r0(i)/rdot0(i))); 에서 r(i,:)=sqrt(r0(i)^2+rdot0(i)^2/w(i)^2)*cos(w(i)*t); 로 바꿔서 진행했습니다. 그 결과 산출된 그래프도 같이 첨부했습니다.
데스크탑으로 돌려도 원하는 그래프가 나오지 않아서 sqrt(r0(i)^2+rdot0(i)^2/w(i)^2) 를 r0(i)로 바꿨더니 올바른 답이 나왔습니다. 그래서 이 부분에 오류가 있다고 생각했습니다.
제가 잘못 생각한 부분이 있으면 어디서 생긴 문제인지 알려주세요.
감사합니다. 답변 완료된 질문과 답변은 수정 및 삭제가 불가합니다. |
|||
- 댓글
- 0
안녕하세요.
제가 확인해본 결과,
우리가 계산할 때는
atan = 1/pi 가 되어서
위상차에 의해
sin(w(i)*t+atan(w(i)*r0(i)/rdot0(i))) = cos(w(i)*t)
이겠지만,
실제 매트랩에서는 아래와 같이
부호가 반대로 계산되는 것 같습니다.
아마 MATLAB 계산 default가
-1/pi 또는 1/pi 중에 하나로 되어서
부호가 반대로 나타나는 것 같습니다.
코드 자체에는 큰 문제가 없이
잘 구현되는 것 같습니다.
좋은 질문해주셔서 감사합니다.

완성된 plot

- 2021-08-08
- 2024-12-12 수정












{kind=link}