


| 제목 | 답변완료 진동 24강 mode summation | ||
|---|---|---|---|
| 질문유형 | 강좌내용 | 교수님 | 권준표 |
| 과목 | 진동학 | 강좌명 | |
| 작성자 | 유*휴 (c*****3) | 등록일 | 2023-11-21 14:20 |
| 첨부파일 | |||
|
#진동 #모드 #모달
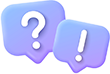
안녕하세요 교수님 강의듣던중 질문생겨 질문드립니다. Mode summation에서 Iq’’ + k_til*q=0 꼴에서 q=v*e^jwt 로 놓고 해석하셨는데 왜 q로 해석하신건가요??
X좌표계로 나타내면 Mx’’+Kx = 0 C.E det(K-Mw^2)=0 에서 w1 w2 정규화된 u1 u2 벡터구해서 x 좌표계에서 식 유도하면 d_i = [ u(i)^T * x(0) ] / sin theta(i) 똑같이 나오는데 왜 식이 다르죠,,? q 좌표계를 쓴 이유가 무었인가요? 그리고 식이 왜 다른건가요.. x좌표계에서 식전개해도 오류가 없어보이는데..
감사합니다. 답변 완료된 질문과 답변은 수정 및 삭제가 불가합니다. |
|||
- 댓글
- 0
결국 질문은
Cholesky Decomposition을 하는 이유를
알고 싶은 것 같습니다.
먼저
Cholesky Decomposition는
진동학(vibrational analysis)뿐만 아니라
공학, 물리학, 컴퓨터 과학 등
다양한 분야에서 이용되는데
어떤 양의 정부호(positive-definite)인 대칭 행렬을
두 개의 행렬의 곱으로 분해하는 방법입니다.
Cholesky Decomposition가
진동학에서 중요성이 높은 이유는 다음과 같습니다:
1. 수치 안정성(Numerical stability): Cholesky 분해는 수치적으로 상당히 안정된 방법이며, 연립방정식과 역행렬을 구하는데 있어서 기타 방법들(예: Gauss elimination)보다 더 정확할 수 있습니다.
2. 계산 효율성(Computational efficiency): Cholesky 분해는 양의 정부호 대칭 행렬에 대해서는 다른 분해 방법들에 비해 계산량이 적습니다, 그래서 컴퓨팅 리소스를 절약할 수 있습니다.
3. 물리적인 시스템의 모델링(Modeling of physical systems): 진동학에서 물리적 시스템은 종종 양의 정부호 대칭 행렬로 표현되는 질량 및 강성 행렬로 모델링됩니다. Cholesky 분해는 이러한 행렬을 처리함에 있어서 유용하며, 시스템의 속성을 분석하는 데 사용할 수 있습니다.
Cholesky Decomposition을 통해
미분방정식이 재구성되었으므로
x가 아닌 q벡터를 구해야 하고
마지막에 modal coordinate(r)을 통해
최종적인 x를 구할 수 있습니다.
질문에 대한 답이 됐기를 바랍니다.
- 2023-12-06
- 2024-12-12 수정












{kind=link}